D20. A three-day workshop on Mechatronics and Robotics (2022).
1. Robotics: CoppeliaSim tutorials and various projects based on a differential drive car. Projects on line following, wall following, maze navigtation.
2. Mechatronics: Understanding sensors, actuators, and arduino programming. Project: Obstacle avoiding car.
D19. A three-day workshop on Mechatronics and Robotics (2021). (link)
1. Robotics: Simulation and animating manipulators and differential drive car. Project: Program a car game
2. Mechatronics: Understanding sensors, actuators, and arduino programming. Project: Obstacle avoiding car
D18. RoboCar - modified from an existing RC control car. RC controlled cars available in hobby stores provide a nice sturdy
chassis and powerful motors. However, they are limited to RC control.
What if we remove the existing electronics and controllers in an RC car
and replace them with Arduino and our own sensors? This project
explores the idea. The resulting car equipped with multiple line
sensors and a controller is quite fast as seen in the video. YouTube video
D17. Open source quadrupedal robots. Cost is ~$2000
Instructions with files and code on GitHub. A video is here.
Instructions are posted here: RoboCarTutorials
D16. MATLAB code to simulate the spring-loaded inverted pendulum model of hopping with controlled foot placement MATLAB
code. Includes code to find the limit cycle, find linearized
stability, and animation.
D15. MATLAB code to simulate the simplest walker using direct collocation method MATLAB
code to simulate the simplest walker using direct collocation method
MATLAB code. See The
Simplest Walker by Garcia et al. J. of Biomechanics
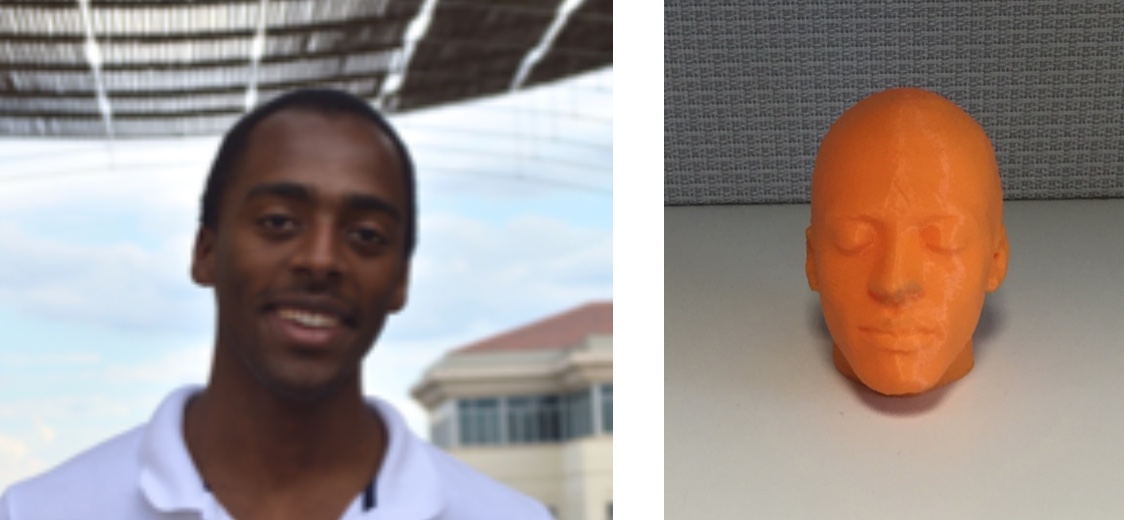
D14. Tips for 3D scanning using Artec Eva scanner. A one-page file and an
accompanying YouTube video A jpeg file that shows a 3Dprinted produced by the scan is here.
D13. Robobug, a vibration motor actuated robot. Suitable as a weekend project
for elementary- and middle-school kids. No programming needed. A pdf handout and a detailed step-by-step video, YouTube video
D12. Course material for 2 day LEGO robotics camp. Suitable for high schoolers with little or no experience with LEGO Mindstorms. Student learn by watching videos and then work through progressively difficult projects: (1) Car racing, (2) Line-following, and (3) Parallel Parking. All material is on GitHub. YouTube video
D11. Introduction to ROS and URDF for robot modeling (assumes minimal knowledge of Ubuntu, ROS, and C++) Visit the web page here.
D10. Demonstration of energy principles in rigid body dynamics. Two cylinders identical in all respects (same mass, radius, and length) except that one is filled with water and other with honey are made to roll down an incline. The one filled with water rolls down first. Why? Watch this video for the answer.
D9. Templates for report writing A template for writing ASME style reports by Kyle Lamoureux (includes tables, figures, equations, page layout, headings, nomenclature, flowchart, and appendix)
A template for writing reports in the RAM lab by Pranav Bhounsule (short version of above)
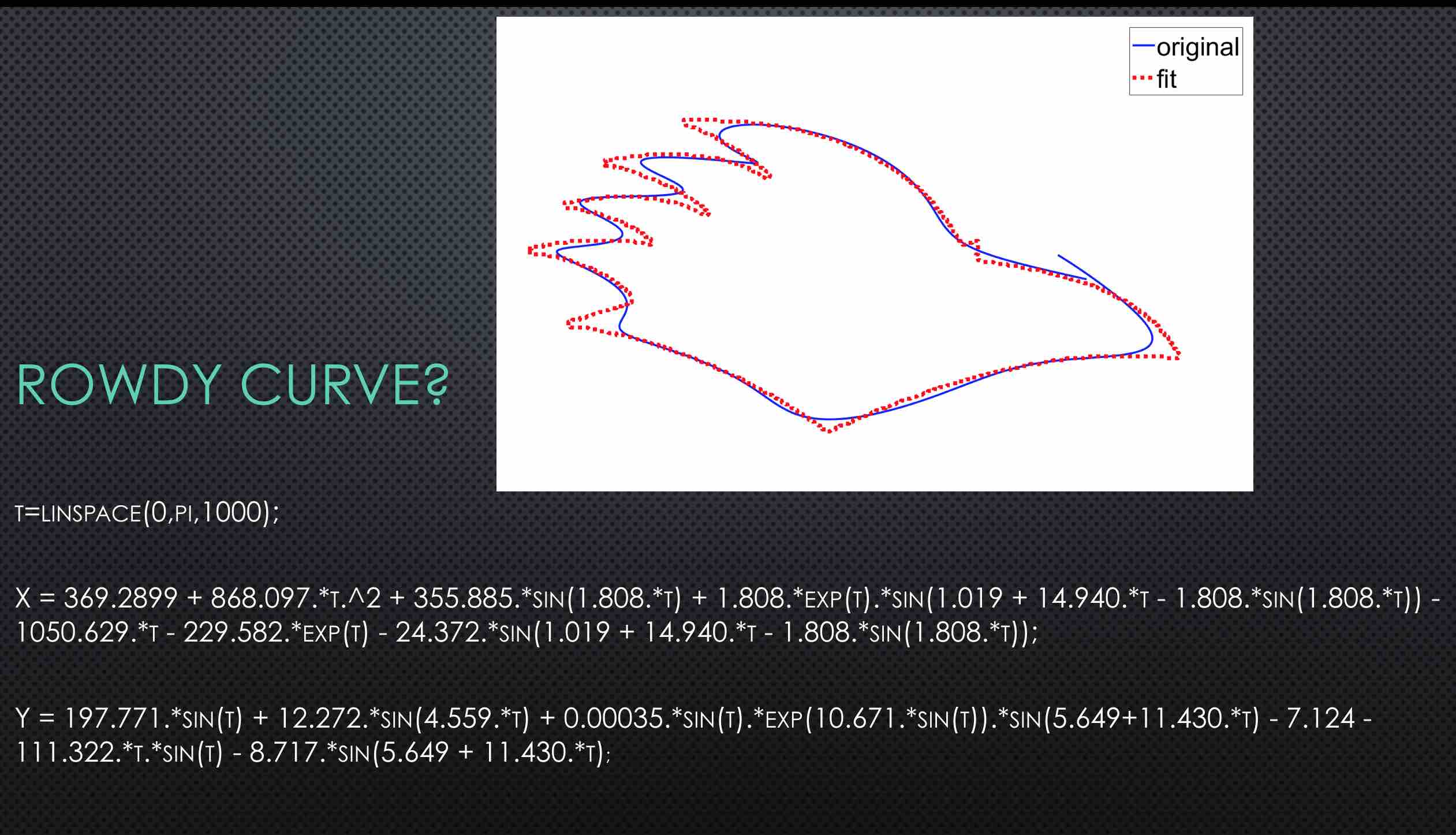
D8. A mathematical equation for the UTSA mascot, The Rowdy by Tyan Kinsey, Jose Perez, and Bradley Hammond. Picture | MATLAB file | Report
D7. Spring mass hopper with Raibert-style decoupled controller. MATLAB file: raibert_hopper.m by Chelsea Moussouni
D6. Animatronics Face. Tutorial created by Geoffrey Toombs and hosted on instructables (video).
D5. Make a paper walker. Created by Christian Trevino for the Inventors Workshop at the Children's Museum, San Antonio. Print page 4 on letter size paper and follow the instructions in the PDF (video). The paper toy walker was inspired by the book, Walking Automata: A Collection of Self-Moving Models to Cut Out and Make by Magdalen Bear.
D4. Make a vibration powered legged robot. Created by Christopher von Brecht for the Inventors Workshop at the Children's Museum, San Antonio. These robots were first created by Fumiya Iida's at ETH, Zurich. Write-up | Files for 3D printing | YouTube Link
D3. Want to get started with Passive Dynamic Walking simulations? MATLAB file: passivewalker.m to simulate a round foot passive walker. Passive walker with poincare section at midstance: passivewalker_mid.m
D2. Want to simulate the rimless wheel and simplest walker? MATLAB files: rimlesswheel.m and simplestwalker.m. See the paper Numerical accuracy of two benchmark models of walking: the rimless wheel and the simplest walker for more details.
D1. Want to get started in robotics? Instructions of assembling and programming a simple wheeled robot (video). Cost is aroung $110.
We have done STEM (Science, Technology, Engineering, and Math) related outreach at local schools and the children's museum in San Antonio. We typically do 2-3 such events every year. Here are some example outreach events.
1. Workshop on creating paper-based walking toys at the San Antonio Children's Museum. (Photo link)
2. Demonstration of various robots created in the Robotics and Motion Lab. (Photo link)
3. Kids tele-operating LEGO robots. (Video link)
4. LEGO Robotics outreach at UTSA. (Video link)
5. Five day coding camp for middle school girls, Girl CodeRunners.
{kind=link}
{kind=link}